Tesla Coil Secondary Winding Machine
After winding my first coil by hand with an electric drill I learned a few things: battery powered drills go flat at the worst times, polyurethane enamel is the enemy, and speed control matters.
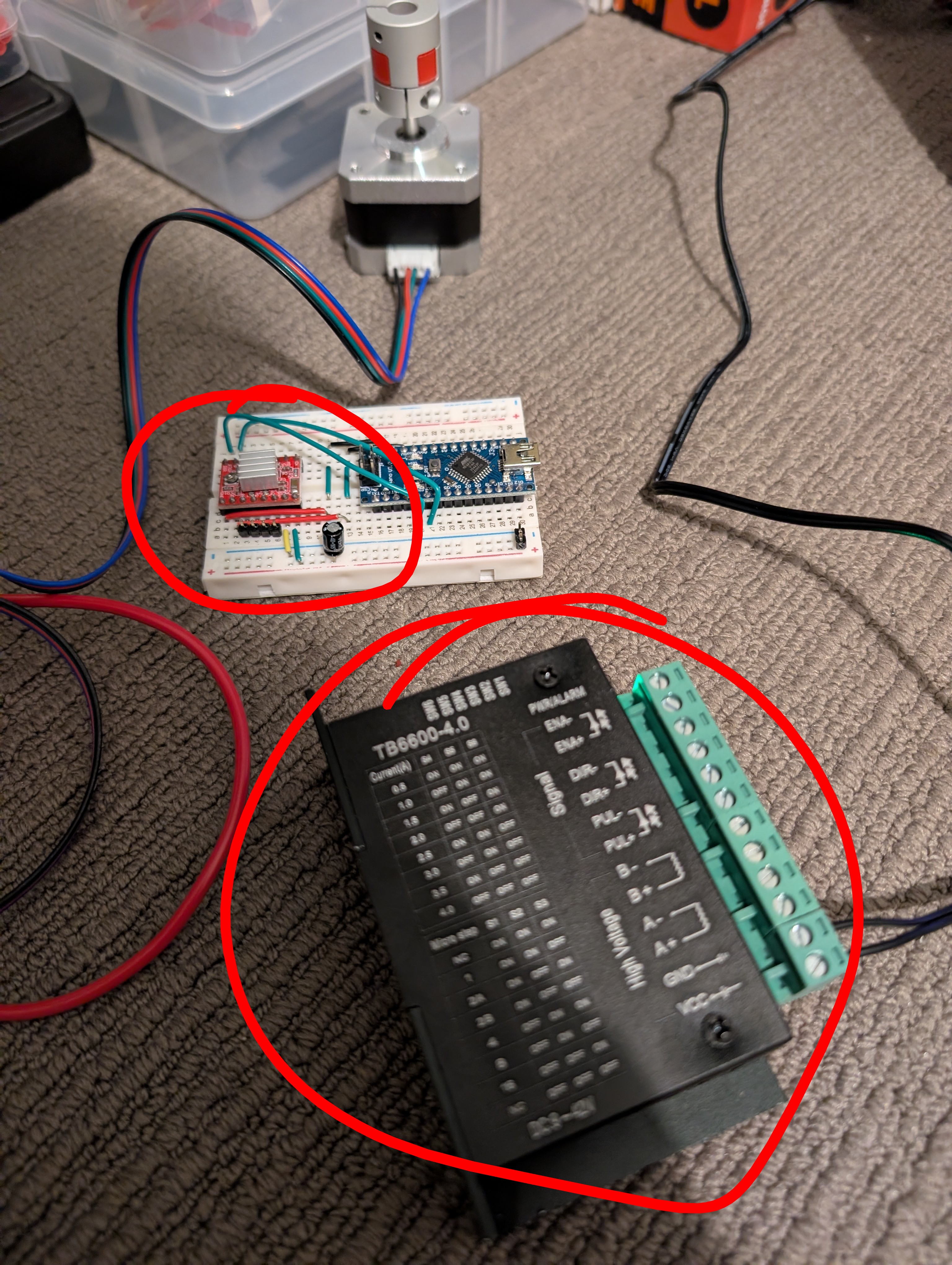
I also attempted, perhaps naively, to drive a NEMA-17 stepper motor using an A4988 driver. It was lacking in capability to say the least. The TB6600-4.0 is a significant upgrade.
 |
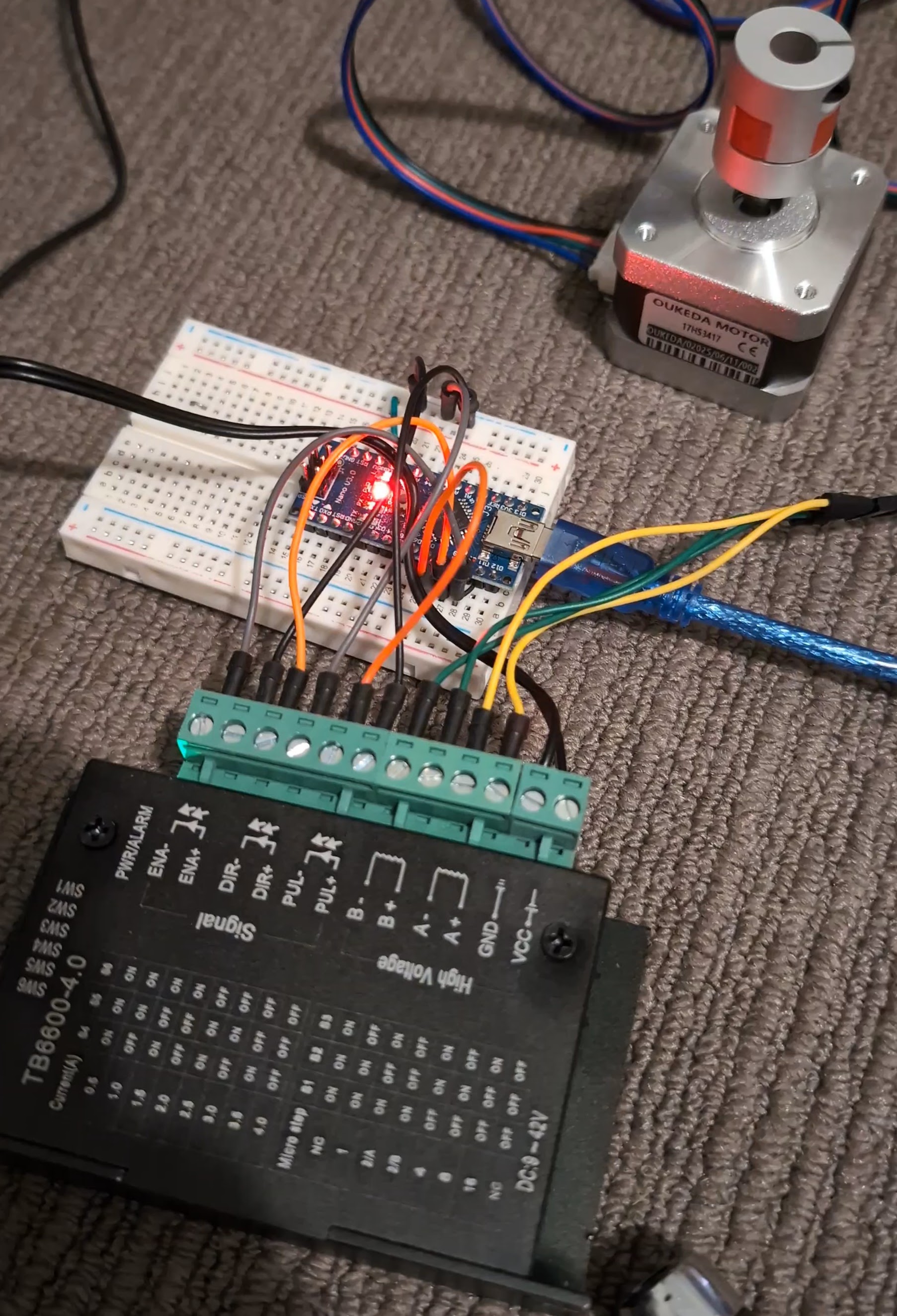 |
| A4988 vs TB6600-4.0 | First light - NEMA 17 running |
Parts List
| Component | Jaycar Part | Price |
|---|---|---|
| 10kΩ Linear Pot | RP7510 | $3.95 |
| Pot Knob | HK7762 | $2.75 |
| DPDT Centre-Off Toggle (Direction) | ST0576 | $5.95 |
| Red LED Illuminated Switch (Power) | SP0706 | $6.95 |
| SPST Rocker Switch (Momentary) | SK0962 | $2.95 |
| 9 Core Cable | TBD | ~$2/m |
Total: ~$22.55 (plus cable)
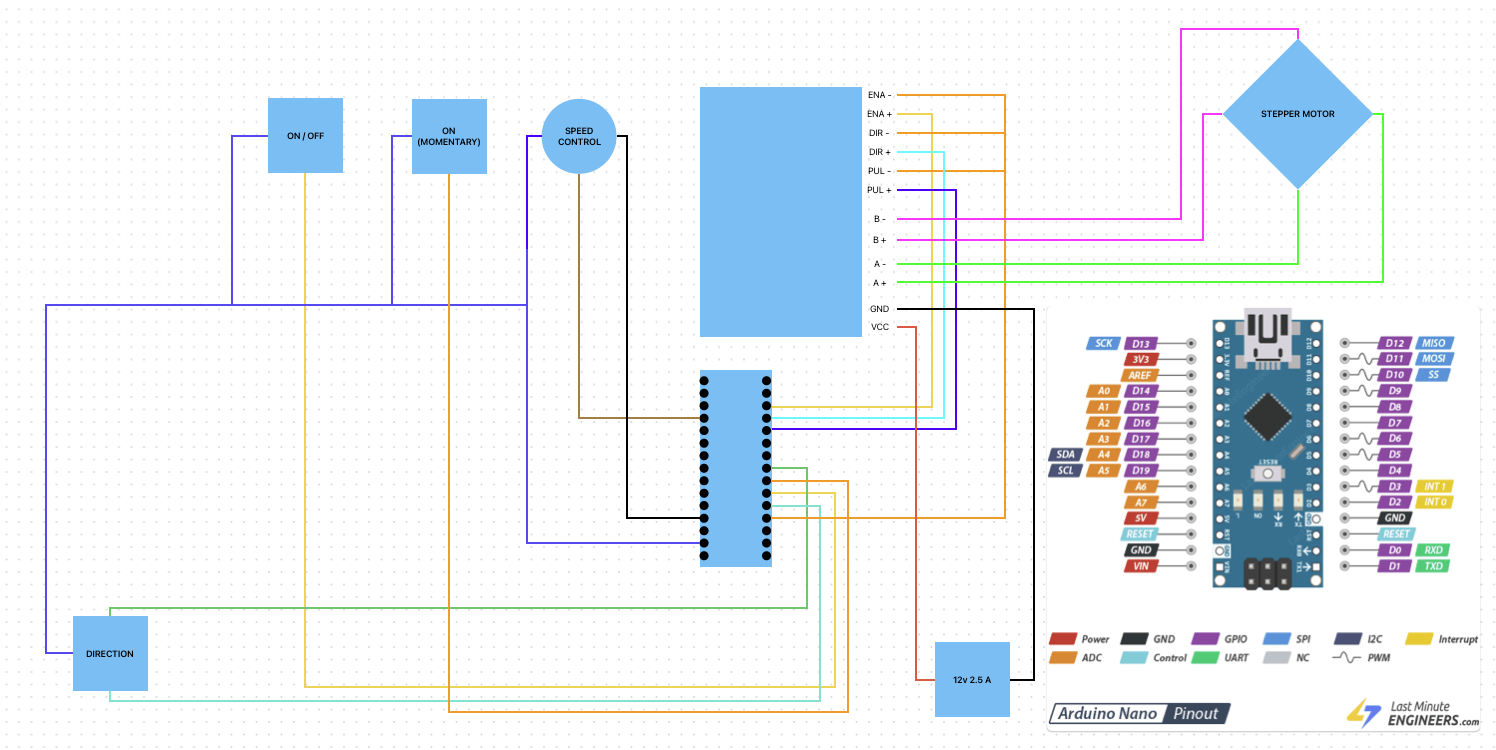
Wiring
9 Core Cable Connections
The control box connects to the Arduino via 9 core cable. Wire colours are dictated by what’s available in the cable.
Control Box End:
| Wire | Component | Terminal |
|---|---|---|
| Brown | Potentiometer | Wiper (middle) |
| Black | Potentiometer | Right pin |
| Blue | Potentiometer + all switches | Left pin / commons (GND) |
| White | DPDT toggle | Left position (1A + 2A jumpered) |
| Green | DPDT toggle | Right position (1B + 2B jumpered) |
| Yellow | Power switch | NO terminal |
| Orange | Momentary button | Either terminal |
| Red | Spare | - |
| Gray | Spare | - |
Arduino End:
| Pin | Wire / Connection | Function |
|---|---|---|
| A0 | Brown | Speed signal |
| 5V | Black | Pot supply |
| GND | Blue | Common ground |
| D2 | White | Direction CW (INPUT_PULLUP) |
| D3 | Yellow | Power on/off (INPUT_PULLUP) |
| D4 | Orange | Momentary start (INPUT_PULLUP) |
| D5 | Green | Direction CCW (INPUT_PULLUP) |
| D8 | TB6600 PUL+ | Step pulse |
| D9 | TB6600 DIR+ | Direction |
| D10 | TB6600 ENA+ | Enable |
| D11 | LED (optional) | Power indicator |
| D12 | LED (optional) | Run indicator |
| D13 | LED (optional) | Direction indicator |
TB6600-4.0 Connections
| Terminal | Connection |
|---|---|
| ENA- | GND |
| ENA+ | Arduino D10 |
| DIR- | GND |
| DIR+ | Arduino D9 |
| PUL- | GND |
| PUL+ | Arduino D8 |
| A+ | Stepper coil A+ |
| A- | Stepper coil A- |
| B+ | Stepper coil B+ |
| B- | Stepper coil B- |
| VCC | Power supply + (12-24V) |
| GND | Power supply - |
Control Box Wiring Detail
Potentiometer (RP7510):
- Left pin → Blue (GND)
- Middle pin (wiper) → Brown (A0)
- Right pin → Black (5V)
DPDT Centre-Off Toggle (ST0576):
The switch has 6 terminals in two rows:
Row 1: [1A] [Centre 1] [1B]
Row 2: [2A] [Centre 2] [2B]
- Centre 1 + Centre 2 → jumper together → Blue (GND)
- 1A + 2A → jumper together → White (D2)
- 1B + 2B → jumper together → Green (D5)
Logic: Toggle left pulls White to GND (D2 LOW = CW). Toggle right pulls Green to GND (D5 LOW = CCW). Centre position = both pins HIGH = STOP.
Power Switch (SP0706):
- NO terminal → Yellow (D3)
- Common → Blue (GND)
Momentary Button (SK0962):
- One terminal → Orange (D4)
- Other terminal → Blue (GND)
Control Logic
| Condition | Result |
|---|---|
| D2 LOW | CW direction selected |
| D5 LOW | CCW direction selected |
| Both D2 & D5 HIGH | Centre-off = STOP |
| D3 LOW or D4 LOW | Motor enabled |
| Pot → A0 | Maps 0-1023 to 500µs-10ms step delay |
Motor runs when: (power OR momentary pressed) AND (direction selected)
Arduino Code
/*!
* @file coil_winding_controller.ino
* @brief TB6600 stepper driver with manual controls for Tesla coil winding
* @version V1.0
* @date 2025-11-25
*/
// TB6600 driver pins
#define PUL_PIN 8
#define DIR_PIN 9
#define ENA_PIN 10
// Control inputs (all INPUT_PULLUP)
#define POT_PIN A0
#define DIR_CW 2
#define DIR_CCW 5
#define POWER_SWITCH 3
#define MOMENTARY_BTN 4
// Optional indicators
#define LED_POWER 11
#define LED_RUN 12
#define LED_DIR 13
void setup() {
pinMode(PUL_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(ENA_PIN, OUTPUT);
pinMode(DIR_CW, INPUT_PULLUP);
pinMode(DIR_CCW, INPUT_PULLUP);
pinMode(POWER_SWITCH, INPUT_PULLUP);
pinMode(MOMENTARY_BTN, INPUT_PULLUP);
pinMode(LED_POWER, OUTPUT);
pinMode(LED_RUN, OUTPUT);
pinMode(LED_DIR, OUTPUT);
digitalWrite(ENA_PIN, LOW);
digitalWrite(PUL_PIN, LOW);
digitalWrite(LED_POWER, HIGH);
}
void loop() {
bool dirCW = (digitalRead(DIR_CW) == LOW);
bool dirCCW = (digitalRead(DIR_CCW) == LOW);
bool powerOn = (digitalRead(POWER_SWITCH) == LOW);
bool momentaryOn = (digitalRead(MOMENTARY_BTN) == LOW);
bool motorShouldRun = (powerOn || momentaryOn) && (dirCW || dirCCW);
if (motorShouldRun) {
int potValue = analogRead(POT_PIN);
int stepDelay = map(potValue, 0, 1023, 500, 10000);
digitalWrite(ENA_PIN, HIGH);
if (dirCW) {
digitalWrite(DIR_PIN, LOW);
digitalWrite(LED_DIR, LOW);
} else {
digitalWrite(DIR_PIN, HIGH);
digitalWrite(LED_DIR, HIGH);
}
digitalWrite(PUL_PIN, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(PUL_PIN, LOW);
delayMicroseconds(stepDelay);
digitalWrite(LED_RUN, HIGH);
} else {
digitalWrite(ENA_PIN, LOW);
digitalWrite(LED_RUN, LOW);
}
}
I am thinking the next step will be to utilise a buck converter to step the 12v stepper power supply down to 5v to power the Arduino nano